title: Opencv RotatedRect类中的points、angle、width、height等详解.md
toc: true
date: 2021-12-22 09:25:00
https://blog.csdn.net/mailzst1/article/details/83141632
在OpenCV中,经常要用到minAreaRect()函数求最小外接矩形(旋转矩形)。该函数返回一个RotatedRect类对象。
RotatedRect类定义如下:
类中有中心点center、尺寸size(包括width、height)、旋转角度angle共3个成员变量;
成员函数中,points()函数求矩形的4个顶点;boundingRect()函数求包含最小外接矩形,与坐标轴平行(或垂直)的最小矩形。
理解这些变量在图形中的对应关系,是正确应用该类的基础。先上示意图:
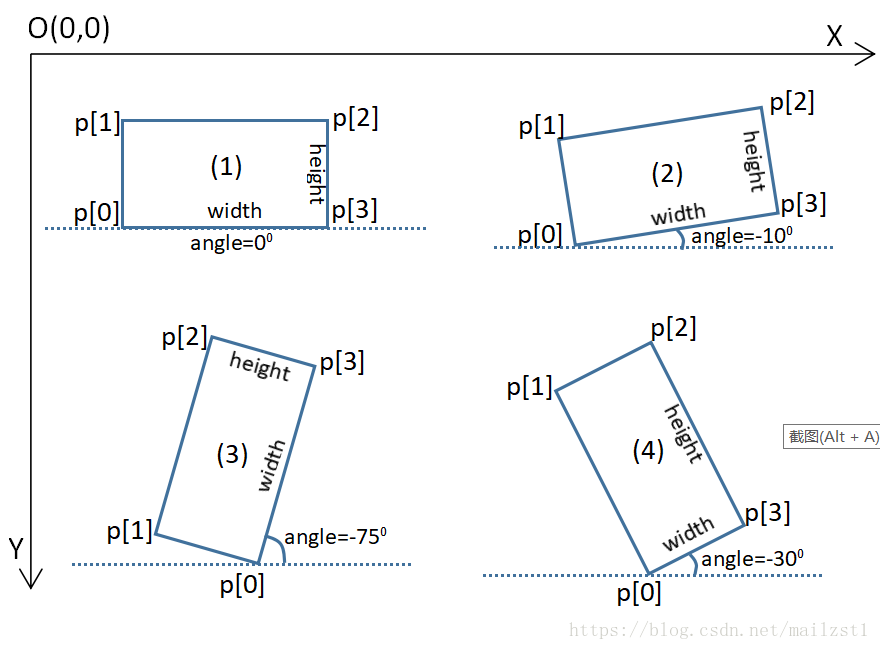
根据上图,说明以下几点:
Opencv采用通用的图像坐标系,左上角为原点O(0,0),X轴向右递增,Y轴向下递增,单位为像素。
矩形4个顶点位置的确定,是理解其它各变量的基础,其中p[0]点是关键。
顶点p[0]的位置可以这样理解:
ⓐ 如果没有边与坐标轴平行,则Y坐标最大的点为p[0]点,如矩形(2)(3)(4);
ⓑ 如果有边与坐标轴平行,则有两个Y坐标最大的点。此时,左侧的点为p[0]点。如矩形(1)。
即:Y坐标最大的点为p[0]。如果有两个最大的Y坐标,则左侧点(X坐标较小)为p[0]。
p[0]~p[3]按顺时针方向依次排列。
p[0]到p[3]之间的距离为宽width,其邻边为高height。
角度angle,是以p[0]顶点,平行于X轴,且与X轴方向相同的射线为始边,按逆时针方向旋转到宽边p[0]p[3]所经过的角度,
取负值,取值范围为(-90, 0]。