title: Grid Map 栅格地图.md
toc: true
date: 2021-12-22 09:25:00
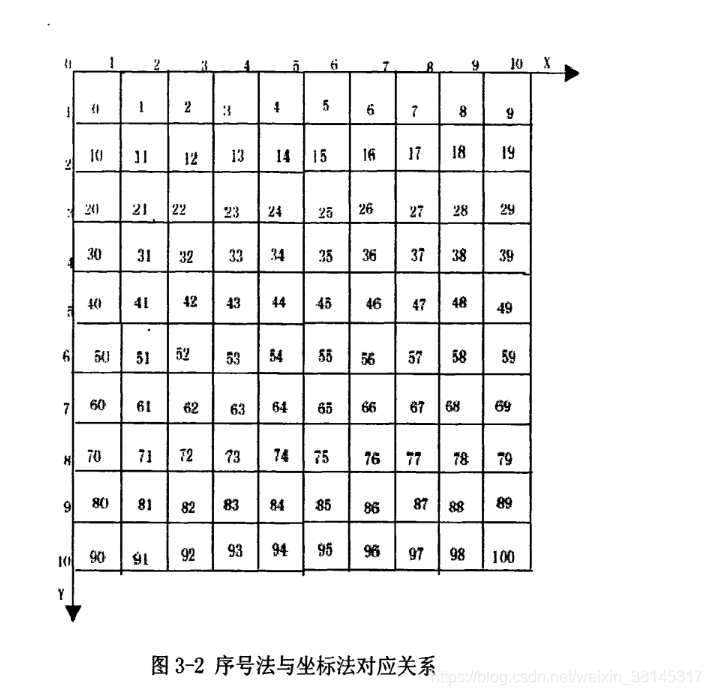
栅格地图有两种表示方法,直角坐标系法和序号法,序号法比直角坐标法节省内存
栅格的大小是个关键因素,栅格选的小,环境分辨率较大,环境信息存储量大,决策速度慢。
栅格选的大,环境分辨率较小,环境信息存储量小,决策速度快,但在密集障碍物环境中发现路径的能力较弱。
在栅格地图上,有这么一条原则,障碍物的大小永远等于n个栅格的大小,不会出现半个栅格这样的情况。
当机器人新进入一个环境时,它是不知道室内障碍物信息的,这就需要机器人能够遍历整个环境,检测障碍物的位置,并根据障碍物位置找到对应栅格地图中的序号值,并对相应的栅格值进行修改。自由栅格为不包含障碍物的栅格赋值为0,障碍物栅格为包含障碍物的栅格赋值为1.
通常把终点设置为一个不能到达的点,比如(-1,-1),同时机器人在寻路过程中遵循“下右上左”的原则,即机器人先向下行走,当机器人前方遇到障碍物时,机器人转向右走,遵循这样的规则,机器人最终可以搜索出所有的可行路径,并且机器人最终将返回起始点。
参考资料:https://blog.csdn.net/weixin_38145317/article/details/86595643