Catalogue
在安装CUDA库之前请确定以下事项已完成
- boot security已经关闭(从电脑bios上设置)(若不关闭会导致英伟达显卡驱动无法安装)
- 英伟达显卡驱动已安装
查看显卡支持的cuda版本
ctrl+alt+t打开终端,输入nvidia-smi
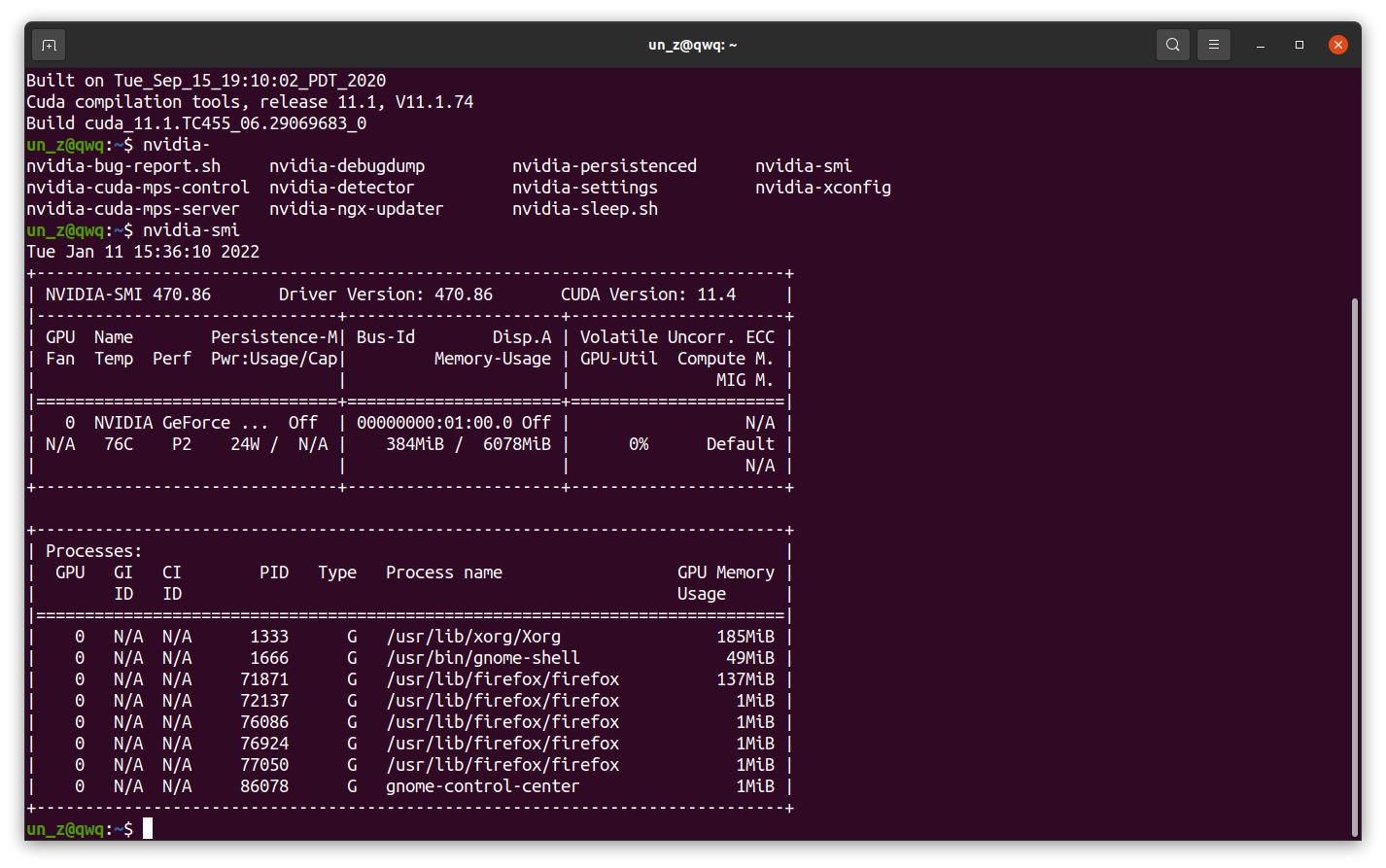

这里可以看到当前显卡最大支持的cuda版本为11.4
2. 到英伟达的cuda官网选择对应的版本并下载安装
https://developer.nvidia.com/cuda-toolkit-archive
使用deb安装不再叙述,下面讲解使用runfile安装
(deb安装会自动配置依赖)
(runfile安装不会配置相关依赖,需要手动添加全局变量)
根据下方给出的命令,打开终端并输入(或则用迅雷下载run文件,拷贝到ubuntu)
环境变量配置
在~/.bashrc中添加如下
1
2
3export PATH=/usr/local/cuda/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH使环境变量生效
source ~/.bashrc配置 /etc/ld.so.conf.d/cuda.conf 添加如下内容
1
/usr/local/cuda/lib64
使库生效
1
sudo ldconfig